




玩乐高学机械:一路猴走
教学目标
1、学会制作一个挥手离开的猴子,告别2016年 2、学会曲柄摇杆结构的制作和应用
引入
2016年很快就要离我们远去了,今天,玩乐高学机械跟你一起做一个挥手告别的猴哥,祝2016年一路“猴”走。
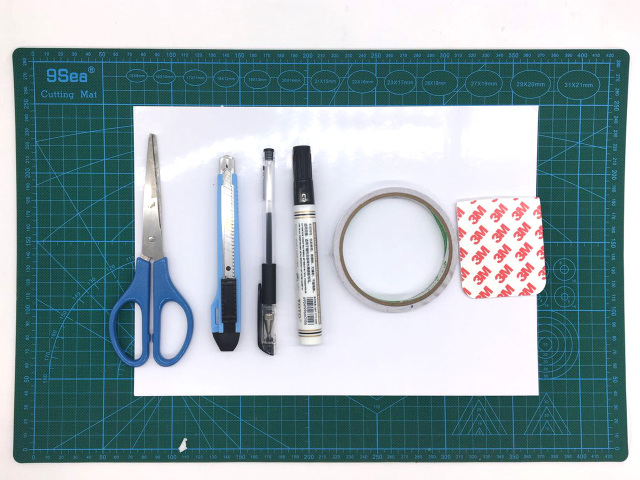
材料准备
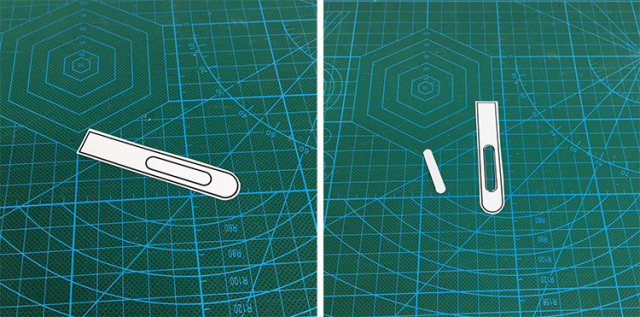
1、乐高件 2、其他材料/工具 A4纸(1张,建议使用160克或200克稍厚一点的纸)、马克笔、中性笔、剪刀、美工刀、双面胶、泡棉胶、切割垫。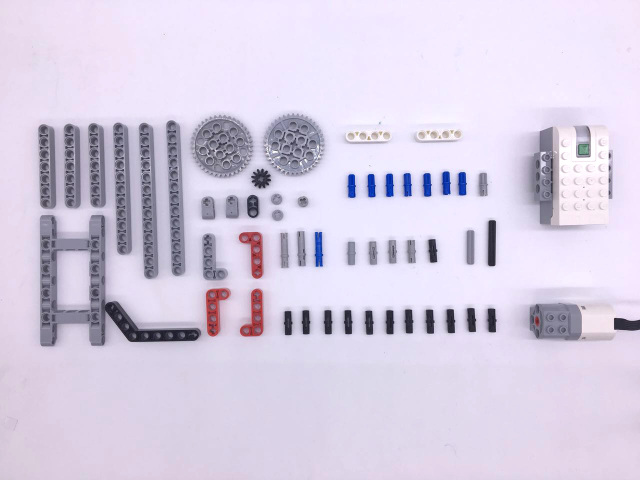
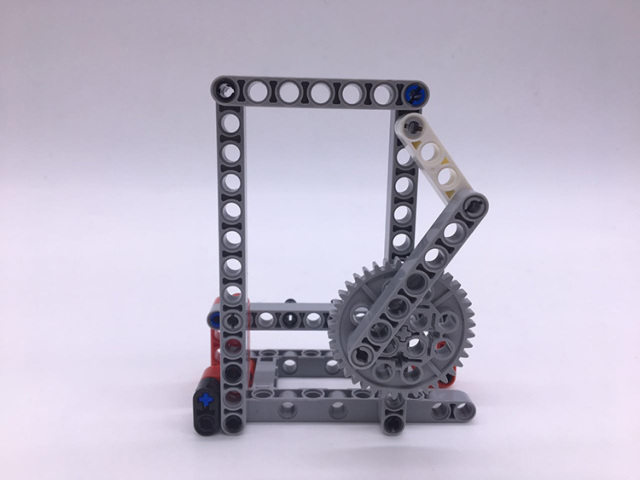
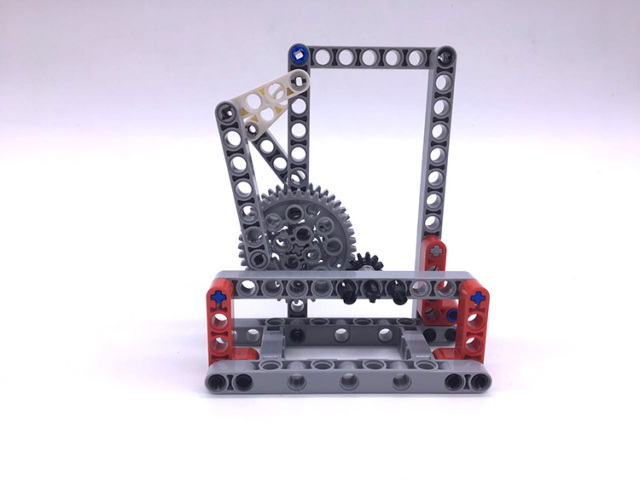
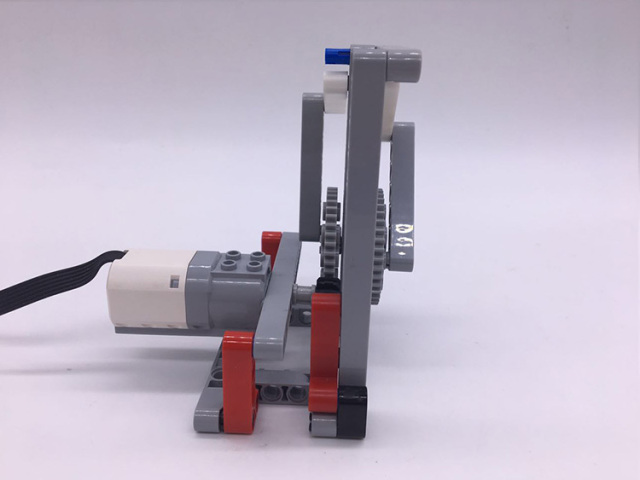
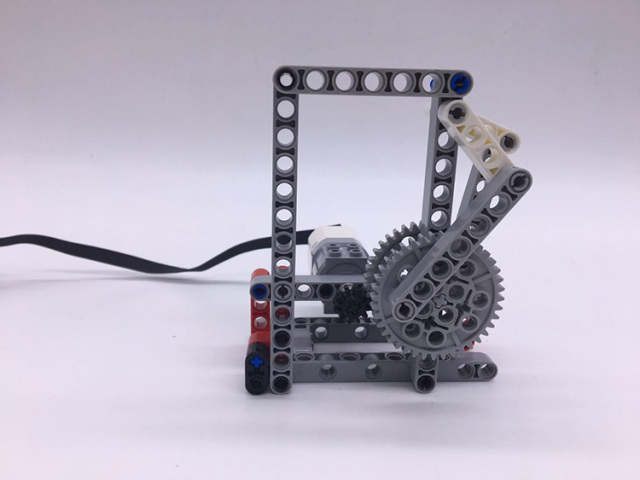
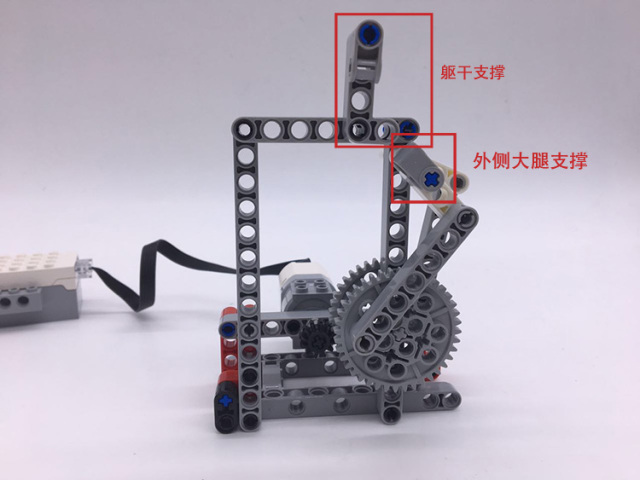
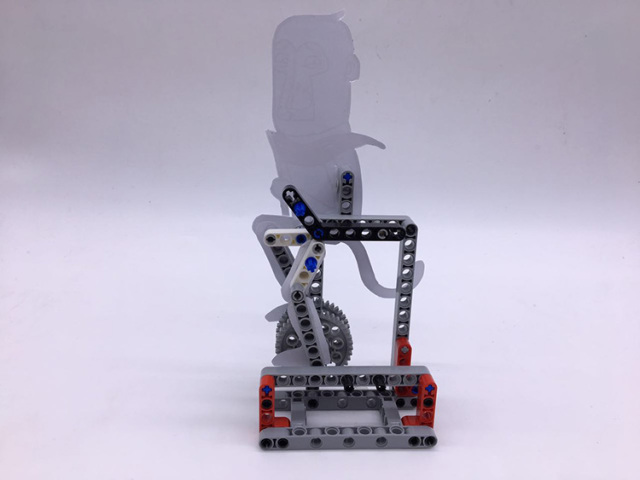
搭建乐高结构
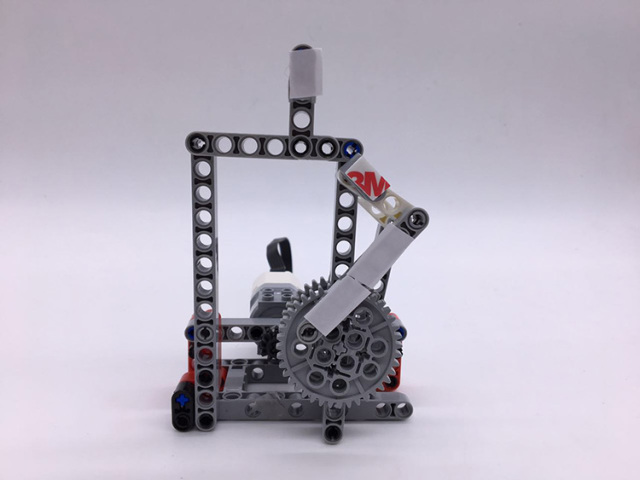
搭建电机和左侧支架。 搭建腿部运动结构(外侧)。 将腿部结构与支架连接。 安装内侧腿部结构。 小贴士: 注意将内侧的腿安在与外侧腿呈180°角的齿轮圆孔上,这样动作会看起来比较协调。 安装小齿轮。 安装电机。 连上电池,启动程序。看看乐高结构是否能灵活的动起来。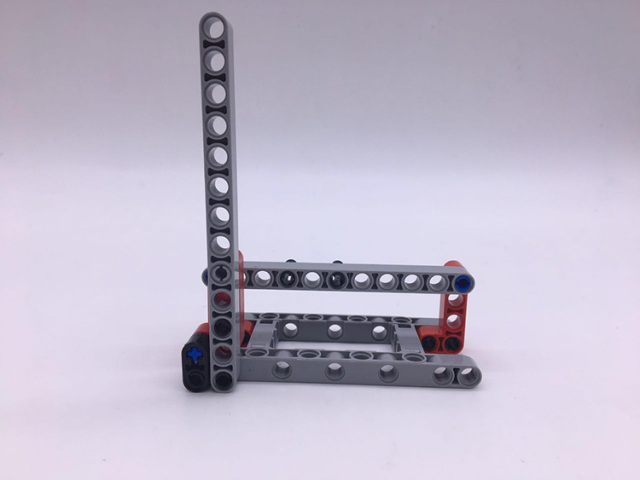



制作“猴哥”身体支撑
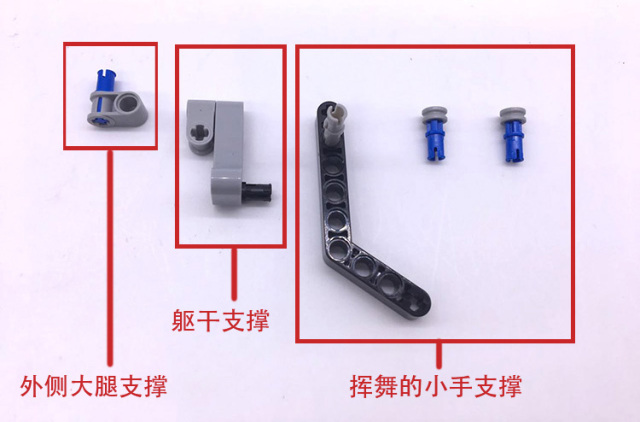
小贴士:
"挥舞的小手"支撑将在下面步骤的粘贴组装时用到。
在卡纸上绘制“猴哥”
相关资源
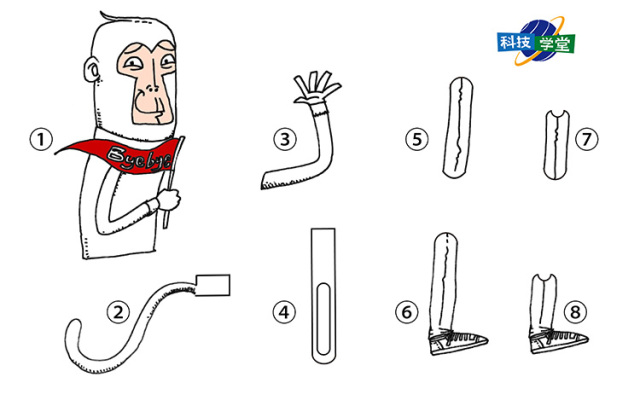
粘贴组装
首先先组装身体、尾巴和朝外侧的一条腿。
在图中位置贴上双面胶和泡棉胶。
黏贴外侧小腿⑤和尾巴②,注意保持它们与后面的乐高件平行。在尾巴粘贴处再粘一层双面胶。

粘上大腿⑥,注意大腿右边不要留太长哦!

旋转齿轮,使腿弯曲到小腿水平。将猴哥的身体①粘贴上去,注意要将尾巴和大腿的粘贴的位置“藏”起来。

开启程序试试看,猴哥外侧的动作是否协调,连接处是否"露馅"。
小贴士:
如果猴哥的尾巴和大腿还是“露馅”了,可以通过再次调整身体的高低位置来弥补哦!
然后,我们再组装里侧的腿。
先将里侧的大腿和小腿位置的乐高件取下来,将剪好的⑦和⑧粘贴在乐高件上 。

再将乐高原路装回去。
最后,安装猴哥的手。我们需要借助④来完成挥手的动作。将③粘在④上。
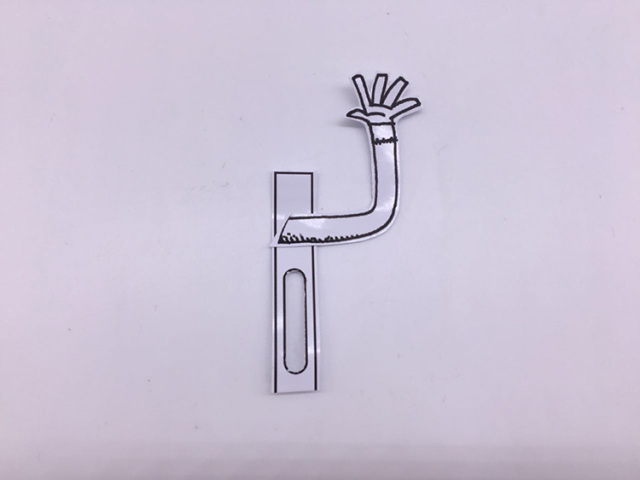
安装"挥舞的小手"支撑乐高件。
使乐高穿过长孔的位置,分别套上两个半轴套。
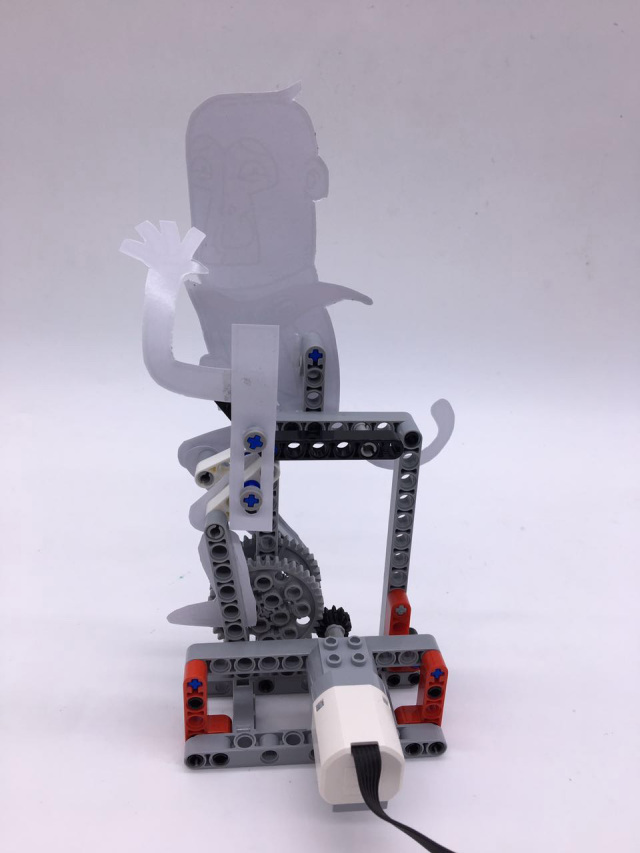
安装完成,开启电机。
看看你的"猴哥"是否也能挥着小手恋恋不舍地骑行着离开呢。
知识拓展
案例中运用到的机构为“曲柄摇杆机构”,主要由曲柄、摇杆组成,是一种基本的平面四杆机构。
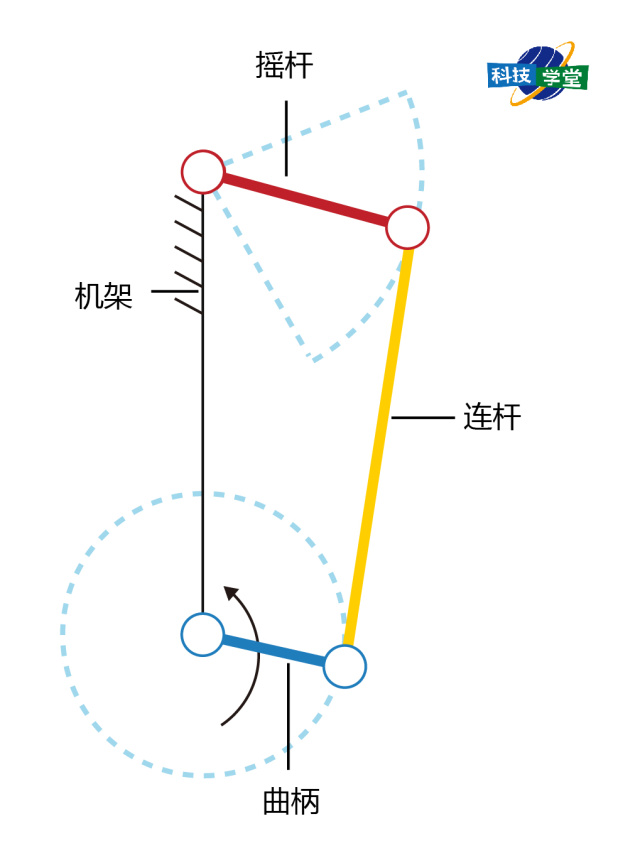
在本案例中曲柄为主动件且等速转动,而摇杆为从动件作变速往返摆动,连杆作平面复合运动。
在机构命名上,“曲柄”与“摇杆”的区别是:
曲柄——能做整周回转的连架杆;
摇杆——只能在一定角度(小于180°)范围内摆动的连架杆。
曲柄摇杆机构在机械设计中的运用非常广泛,主要实现以下功能:
1、将转动运动转化为往复的摆动。例如:雷达天线俯仰搜索机构。
为了搜寻目标,雷达天线的运动须能在半个球面内进行调整,其在0-90°方向上的俯仰运动就是通过曲柄摇杆机构把电机的转动变成往复摆动。
2、将摆动变成连续转动。例如:缝纫机脚踏机构。
3、通过连杆的复合运动完成工业生产所需的运动轨迹。例如本案例中,我们就用曲柄摇杆机构模拟了猴哥双腿骑行时的运动轨迹。
原来猴哥的骑独轮车的背后包含了这么多的机构知识呢!
和我们一起动手制作,跟2016年愉快地道别吧!